
Kalman Filter based signal filtering
May 2020 - December 2020Filtering signal for robust control of flying microrobot (full report)
Overview
Flying microrobots function at very high frequency. There is high frequency noise in their signals, which need to be filtered out. Without filtering them out, the control of robot is very unstable. The most simple way to achieve this is using a low pass filter. However that introduces delay which again introduces instability.
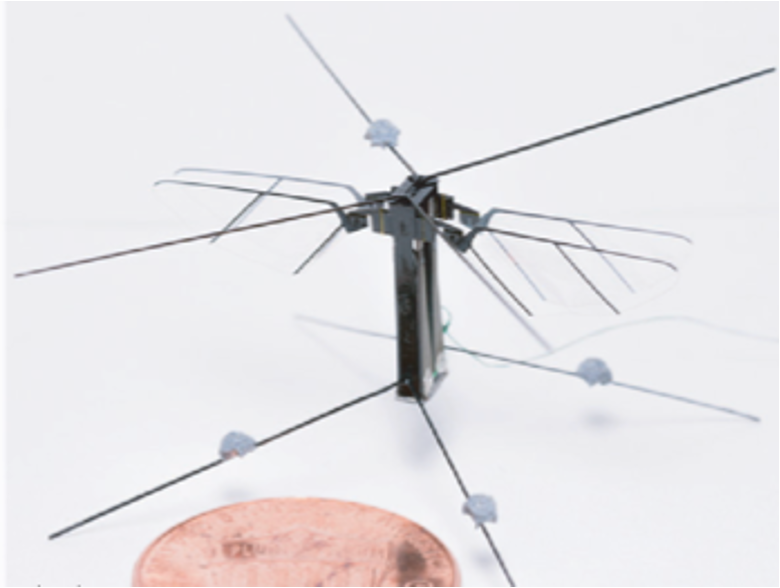
The other idea is to use filters such as LMS or RLS, however they depend on input signal to filter correctly and that was not available. There a Kalman Filter approach was used, where 2 Kalman Filter approaches gave good results.
Results
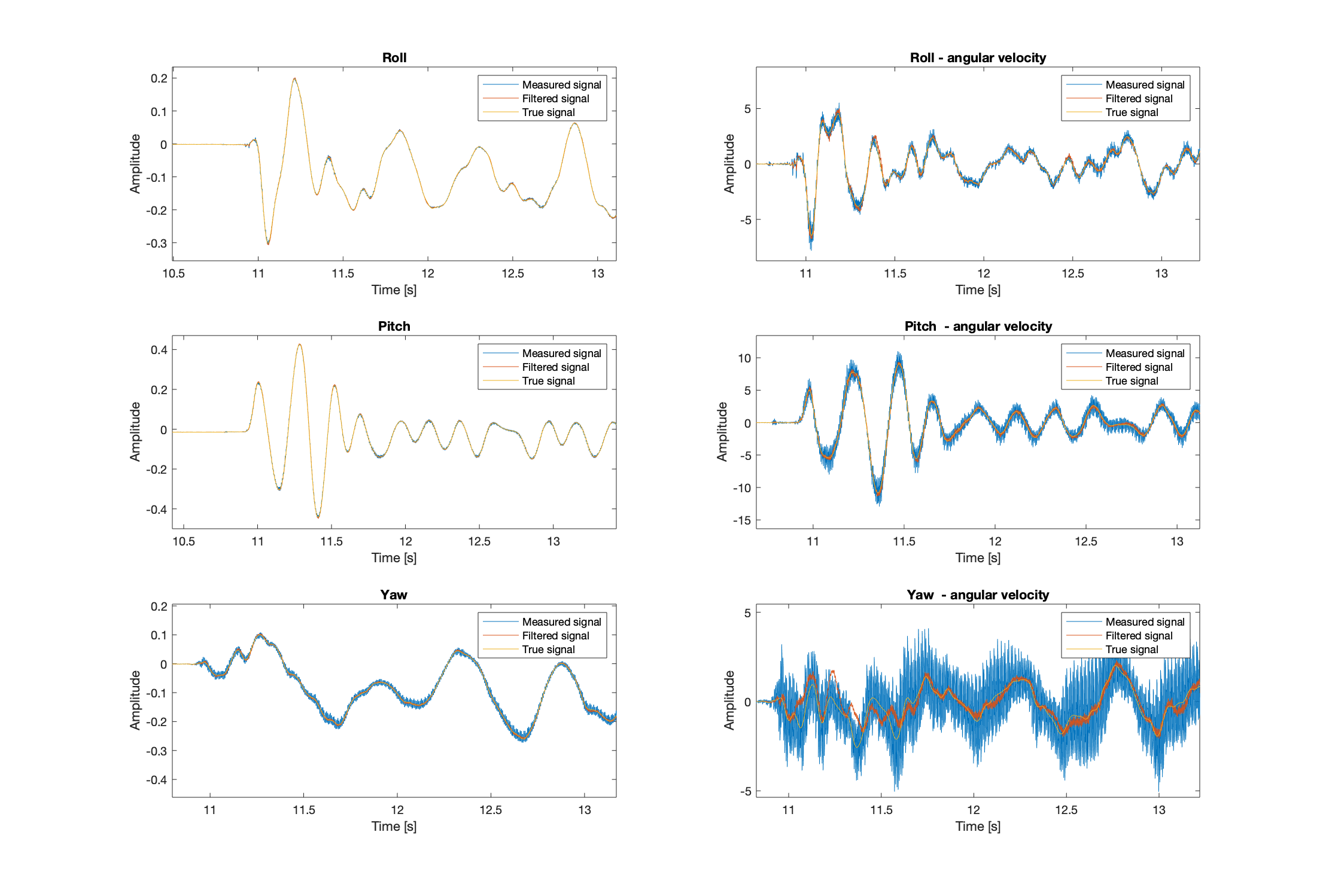
The graph below shows the results from the Linear Kalman Filter. The blue line is the measured signal, the red is the kalman filtered signal and the yellow is the offline filtered signal which represents the true signal. The linear filter is good approximation however for angular velocities do not line up exactly.
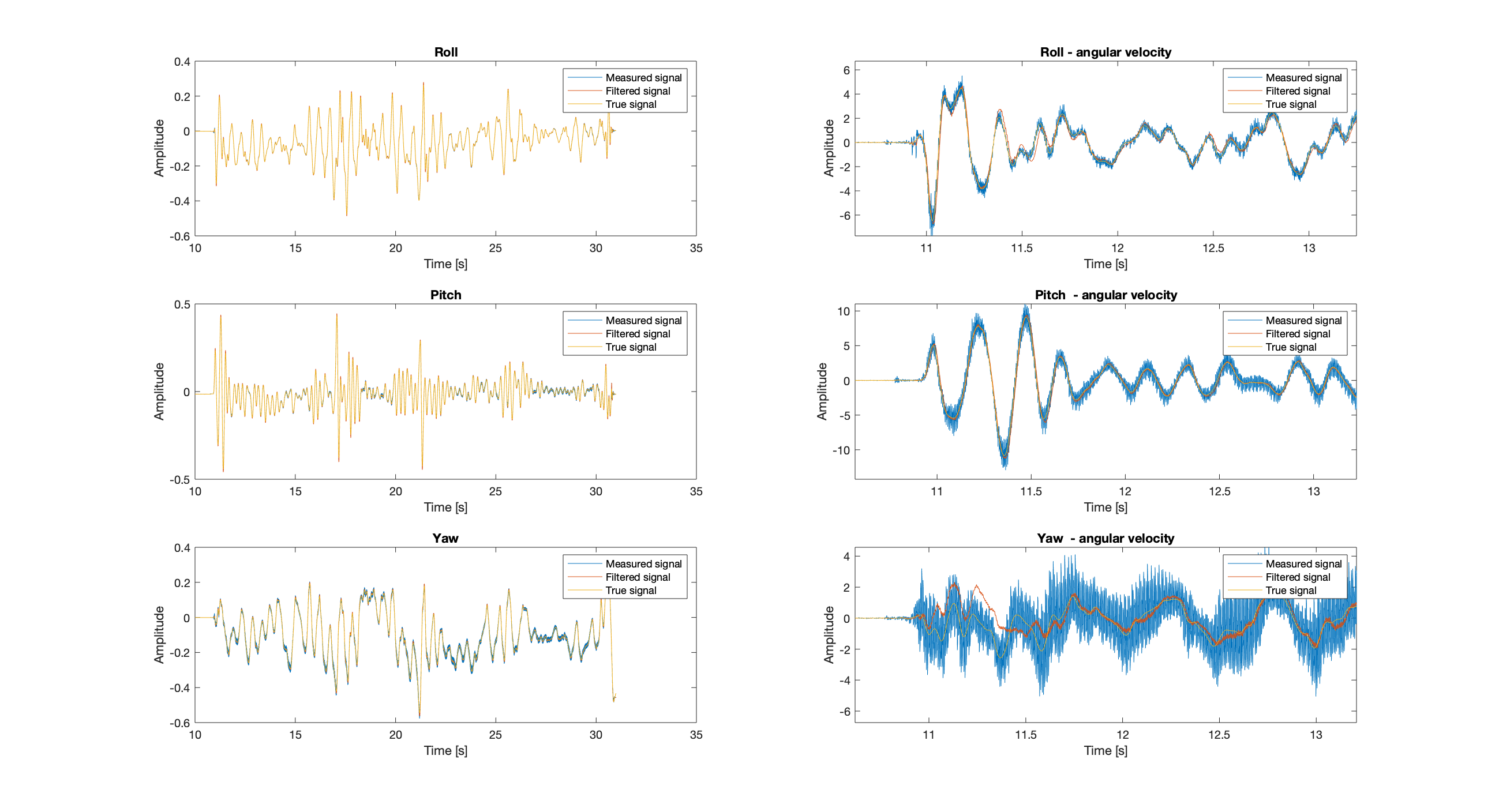
The results from the extended Kalman Filter show far better results, except for the yaw angle angular velocity, there is some initial non-minimum phase response.
Link for report
For more information on the equations and design involved, check out the full report. This report is the property of the Autonomous Microrobotic Systems Lab at USC.